
第七届交互式协作机器人国际学术会议ICR将举办,论文接受投稿中

(图片来源:Science Robotics)
未知环境下多机器人协同作业一直是机器人学界和产业界关注的热点问题。
作为复杂的智能化装置机器人如今已经日益得到广泛的应用,机器人学不再是单独的研究课题,也已成为多个领域跨学科研究的新热点之一,但国内外大多对机器人的问题研究,大都局限于稳定或作恒速运动的结构化或半结构化环境,对于作随机运动这类非结构环境或条件的不确定性问题还相对较少涉及。
交互协作机器人国际会议(ICR)就汇聚了来自不同研究领域的专家学者,希望共同探讨人机协作在工业、社会、医疗、教育等多个不确定环境领域面临的挑战,许多人在论文中分享了自己的解决思路与答案。
交互协作机器人国际会议The International Conference on Interactive Collaborative Robotics (ICR)始于2016年,原是国际语音与计算机会议The International Conference on Speech and Computer (SPECOM)的卫星会议之一,属于语音语义理解这一个分支进化演变而来的机器人会议。
▍本届会议情况

第七届交互协作机器人国际会议7th International Conference on Interactive Collaborative Robotics(ICR 2022)由清华大学和俄罗斯科学院圣彼得堡联邦研究中心共同举办,福州大学、硅步智能承办,会议将于10月21-23日在中国福州正式开始。本届ICR2022将与第七届认知系统与信息处理国际会议(ICCSIP 2022)联合举办。
中国科学院院士乔红和俄罗斯科学院院士Igor Kalyaev担任ICR名誉主席,中国清华大学孙富春、俄罗斯SPC RASAndrey Ronzhin、中国硅步智能常峰担任主席,程序委员会由来自中国、巴基斯坦、沙特、德国、希腊、塞尔维亚、英国、俄罗斯、希腊、土耳其、英国、瑞士、墨西哥等多国专家构成,ICR可以说是机器人领域国际**会议之一。
第七届会议的主要议题是在不确定性和环境变异性条件下,一个或多个机器人在配备嵌入式传感器网络和云服务的操作环境中与人进行物理交互的协作行为的基础和手段。
当然,由于机器人是一个交叉学科,机器人领域中延伸出不同的分支,但他们大多都面临各种领域的非结构环境挑战,因此会议依然期待来自辅助机器人、儿童机器人交互、协作机器人、教育机器人、人机交互、医疗机器人、机器人移动系统、家庭机器人、机器人控制与通讯、社交机器人、安全机器人等多个相关领域的研究成果展示。
▍联系方式与投稿
有投稿的作者请提交一份不超过12页的Springer LNCS格式的完整论文,每篇论文将由至少三位独立审稿人单盲评审,被选中的论文将以报告或海报形式呈现,ICR2022提交论文要求是原创未发表论文,并在评审期间不得转投其他会议或刊物。
在线系统提交论文链接:
https://easychair.org/conferences/?conf=icr20220
ICR2022论文集将被EI检索,部分入选的**论文将被推荐至SCI检索期刊的特刊上。论文投稿时间截止至2022年9月1日,录用通知时间为2022年9月30日。
官网:icr2022.gaitech.net
邮箱:icr2022@gaitech.net
会议的更多信息也可以请点击阅读原文查阅。
▍更多往届解决思路参考
机器人应用在工厂等大多数环境中,所处的物理环境大多会出现更多不确定性因素,例如机器人所处的生产线空间可能较小导致人类不可避免进入,又或者服务机器人开始走进光线和阴影不断变化的高速公路以及家庭中,人们需要机器人以人类智能相似的方式作出相应的反应。
研究者和企业会发现,更多机器人走进人类的生产生活,机器人与人类共融相处,必然会涉及人机交互技术,而机器人对场所的感知与理解又是支撑机器人在共融环境中作业的关键,这一问题继续延伸,机器人的再升级更是不可避免遇到如何规划单个或多个机器人进行共融协作的问题。
人工智能与语音语义等研究落地到机器人这一特殊硬件上出现问题的不确定性因素有多个,例如环境、传感器、机器人内部部件、机器人虚拟模型与现实差异、机器人算力和算法等。从2016年开始,ICR会议上就有团队开始跳出纯粹的计算机软件和算法层面,从机器人领域一些小的方向,以跨学科思维和角度出发寻找答案。
例如机器人的交互精度问题,许多学者从传感器自身精度获取与补偿的问题、机器人部件中的减少不确定因素等细微方面开展研究,这种研究随着机器人的变化以及技术的成熟度提升正在走向新的高度。在2017年就有文章研究了移动机器人的非冲突轨迹规划问题,对集中式和分散式两种不同的方法进行了调查和分析,并将这种问题的解决思路应用于在城市环境中为数十架无人机寻找轨道的任务。而到了2020年许多人意识到人机协作(HRC)对机器人感知系统提出了新的挑战,有论文就提出了一种使用电容式接近传感器增强HRC工作空间的概念,并提出了基于接近反馈的无相机多人/多对象检测、定位和跟踪的方法。
当然,这些研究关注的点并非只有一些前沿方向,许多论文有着非常强的落地价值,也有除开高校实验室和研究所之外的企业参与并讨论。例如在2016年就有研究针对机器人控制系统的故障提出了解决办法,其分析了自主机器人如何在没有任何维护的情况下实现维护,从鲁棒性的角度提出了一种分散控制系统提高控制系统的容错潜力的前瞻性可能。
例如在2021年的一篇论文中,由于存在各种不确定因素对控制系统的性能造成影响,甚至会造成控制系统不稳定,就提供了一种对于直接影响CPS操作的环境威胁分类的解决方案,以尽量减少环境对使用无人机等对信息物理系统作业区域进行无线电勘测运行的影响。又例如2021年的一篇文章考虑到了动态环境中的计算问题,提出一种通过节点监控策略的选择来提高计算节点可靠性函数的新技术,该算法能根据环境特点,选择合适的监控方法,为节点提供最小的时间和工作量。
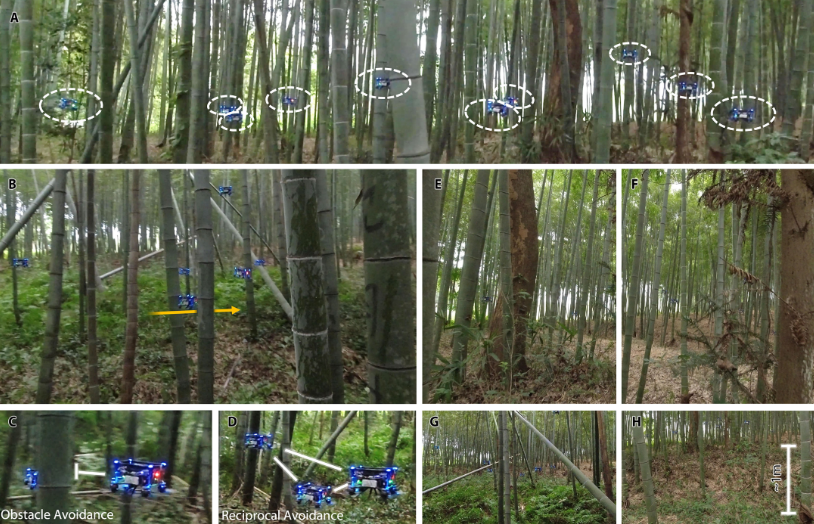
(十架无人机穿越竹林,图片来源:Science Robotics)
从既往诸多文章的情况可以看出,可以说随着技术的进展,机器人这类学科也在不断演进,研究的方向也开始更加多元,ICR会议由于专注机器人与环境交互领域,专业细分特性更强,许多跨领域的创新性优秀成果不断涌现。




;){kind=link}